
An Approach for Instant Conversion of Sensory Data of a Simulated Sensor of a Mobile Robot into Semantic Information
By the increase of automation, many questions arise about the future of robots in human life, how a robot can communicate with another robot, how it can communicate with a human, and how it can interact with objects of its surrounding-these are some of the critical questions to be answered.
For the robot to be able to answer questions and intelligently interact with its environment, it is essential to have a proper understanding of its surrounding; therefore, information must be represented in a way in which a robot can understand them.
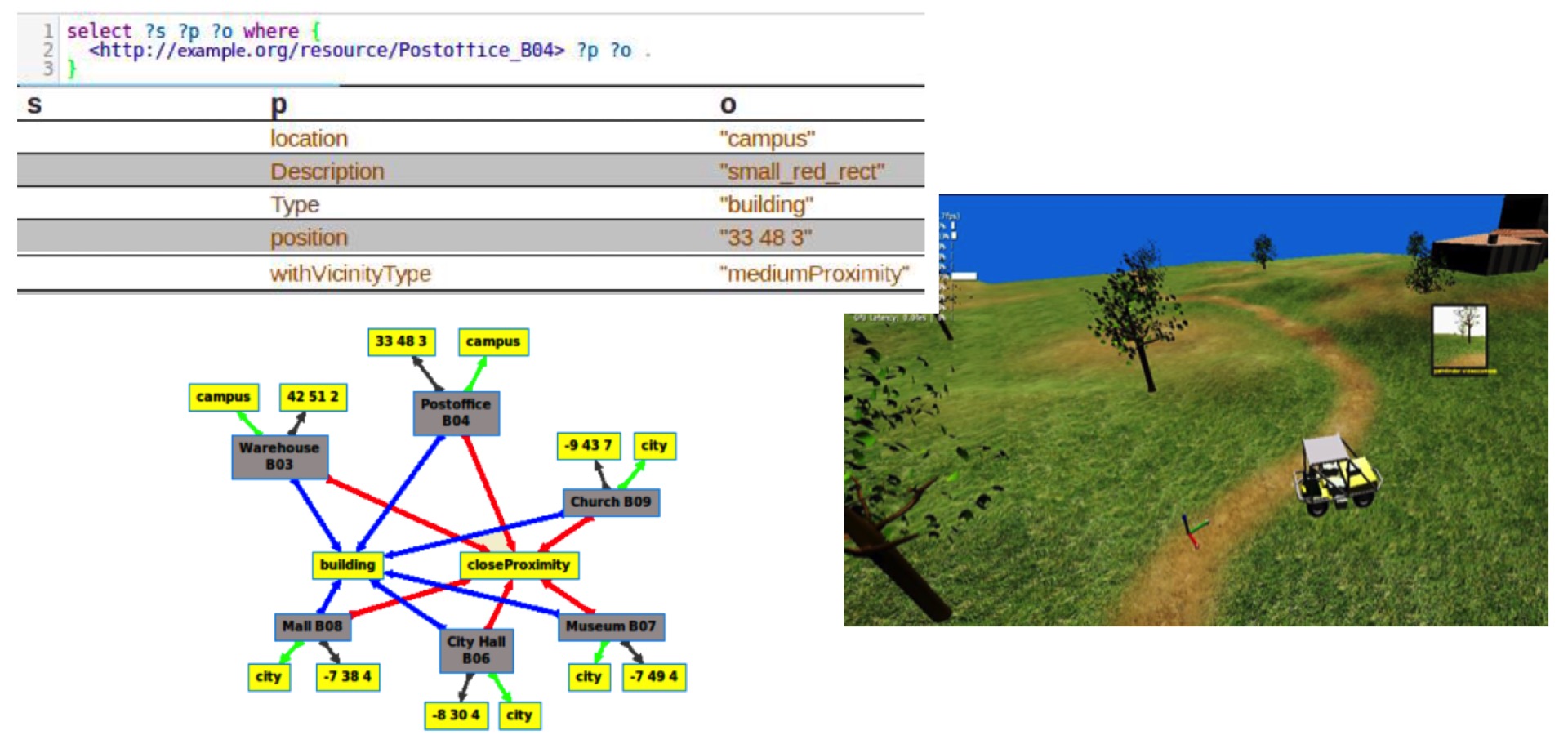
Semantic technology provides some tools and techniques for expressing information that is understandable by both human and robots. This work presents a novel approach of using Resource Description Framework, RDF, which is a semantic web tool for representing information semantically in the robotics field.
For this purpose, a simulated mobile robot equipped with a simulated camera sensor is located in a simulated outdoor environment for navigation. The output of the simulated sensor is collected and converted into a set of statements in RDF format; the obtained statements provide meaning to the detected objects in a way that a robot can understand and utilize.